本步进电机的三相定子绕组在轴向三重配置,三相Y(三个线圈的末端接在一起,简称星形)或△(三个线圈首尾相接,简称三角形)接出三个出线端,为三相驱动PM型爪极步进电机。三相PM型爪极步进电机的结构如下图所示。
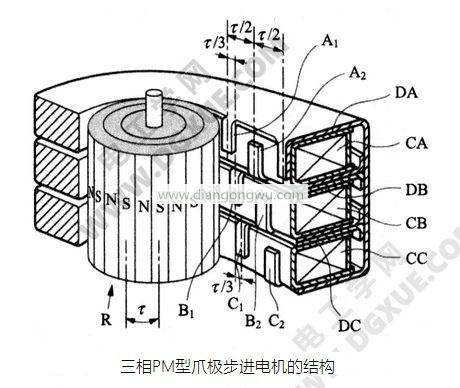
转子R的结构完全与两相步进电机相同。定子每相结构基本上与两相步进电机的相同。与两相步进电机不同的是定子三个相的配置角度不同。上图为三相PM型爪极步进电机的结构,立体剖面图只表示定子与转子结构。转子R与两相PM型步进电机相同,其外表面为N、S 极,极对数为Nr。如图所示,转子R的极对数的节距为τ。定子由A、B、C相组成,各线圈绕制成DA、DB、DC的环状线圈,以CA、CB、CC在转子轴方向纵向配置,线圈CA激磁形成A相的磁极A1和A2,CB激磁形成B相的磁极B1和B2,CC激磁形成C相的磁极C1和C2。此电机转子极对数节距为τ,A1与A2,B1与B2,C1与C2各相差τ/2,A1、B1、C1各相差τ/3,故相邻相A2与B1,B2与C1之间相差τ/6。
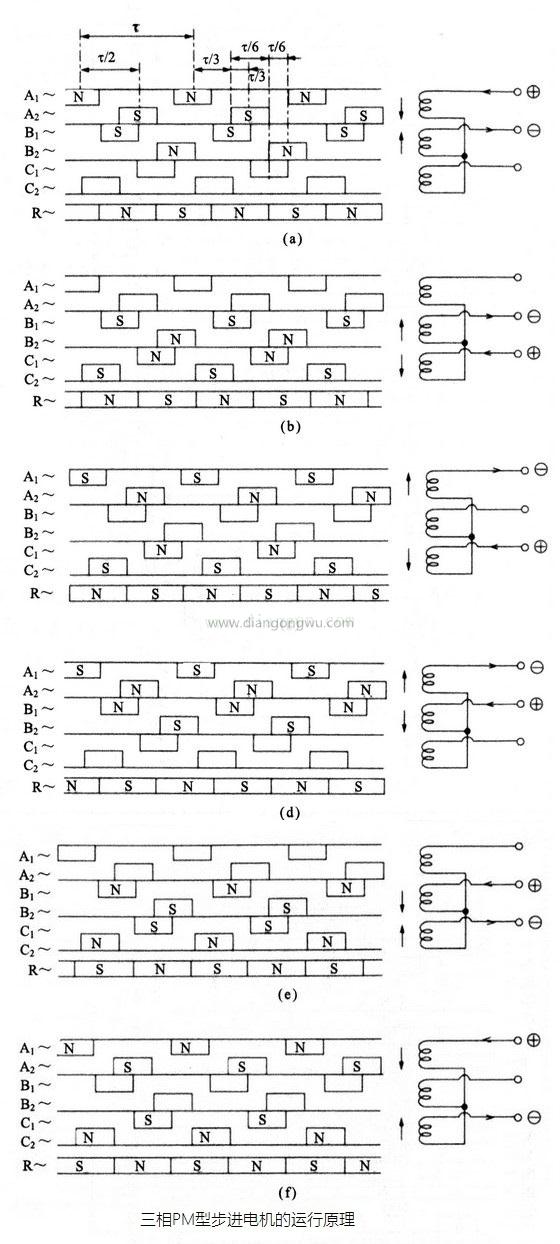
此步进电机的运行原理如下图所示:
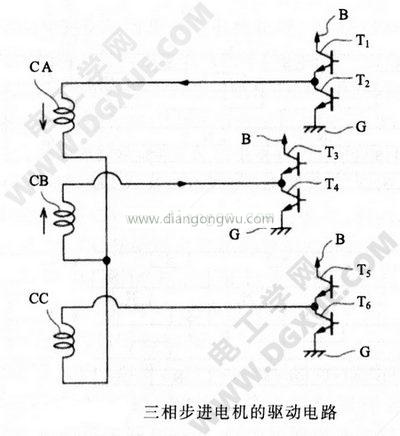
此图各定子相磁极的符号与上面的三相PM型爪极步进电机的结构图相同,两图对照来看。三个线圈CA、CB、CC为Y连接,如用△(三角形)接法也能同样运行。例如,如图(a)所示,A相B相间加电压,两个线圈磁通方向相反如箭头所示。该激磁驱动电路如下图所示。
T1~T6为功率管,各相线圈接法如图所示,T1~T6的B端为电源端,G端为接地端。
T1~T6导通顺序如下表所示,O表示功率管导通,由此给Y接法的3个端子中的两个加正负电压。由于三个线圈的尾端短接,必定使两相绕组顺次激磁,即三相绕组两相激磁驱动。两相PM型步进 电机以两相激磁方式驱动(如上文之中的两相PM型爪极步进电机的运行原理图),此时两相激磁,转子R的磁极静止在两相定子磁极之间。
第一步:T1与T4导通,A相与B相激磁。如上面的三相PM步进电机运行原理图(a)所示,A相与B相激磁,箭头方向为两绕组线圈产生的磁通方向,A相与B相磁极极性图中也有标识。由此,转子R被吸引到稳定位置。
第二步:T1关断,T5变成导通,T4与T5导通,B相和C相激磁,如上面的三相PM步进电机运行原理图(b)所示,B相和C相的线圈磁通方向相反。此时,转子R 从图(a)位置向左移动τ/6的稳定位置,τ/6为三相永磁步进电机的步距角,即步距角为转子一对极极距的1/6。与两相永磁步进电机的1/4相比,分辨率提高1.5倍。
第三步:T4关断,T2变成导通,C相和A相的线圈导通,转子移动到如上面的三相PM步进电机运行原理图(c)所示的稳定位置,转子R又向左移动τ/6。依次切换功率管,使定子绕组依次导通,实现上面的三相PM步进电机运行原理图(d)、(e)、(f)步骤的激磁,使转子依次步进。六步一个循环,转子移动一对极的极距,如此反复循环。与PM型爪极步进电机的特点不同,三相PM型与两相PM型的步进电机相同,转子磁场从N极发出,相邻S极返回,与定子线圈交链。
图(三相PM型爪极步进电机的结构)中A、B、C(A1、B1、C1)相差τ/3即电气角120。,各相偏差τ/6,图(三相PM步进电机的运行原理)的接线方式还不能达到连续步进的动作,要将B相线圈与其他的A相和C相反接才行,即绕制方向相同的三个线圈,将其中一个反接,并装配成一体。
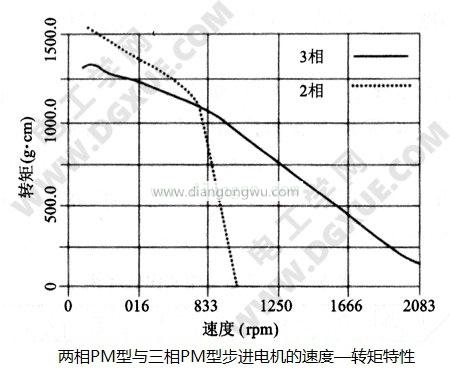
下图为相同尺寸和同一转子的两相PM型与三相PM型步进电机的速度—转矩特性。
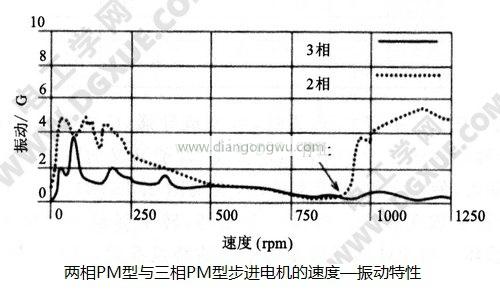
其速度—振动特性如下图所示。

转矩特性方面,三相PM型步进电机在高速旋转时转矩较高;振动特性中三相PM型在步进电机低速下比较小;相应的噪音特性与两相PM型电机相比有更大改善。总之,三相PM型步进电机虽然结构比两相PM型步进电机复杂,但性价比更好。
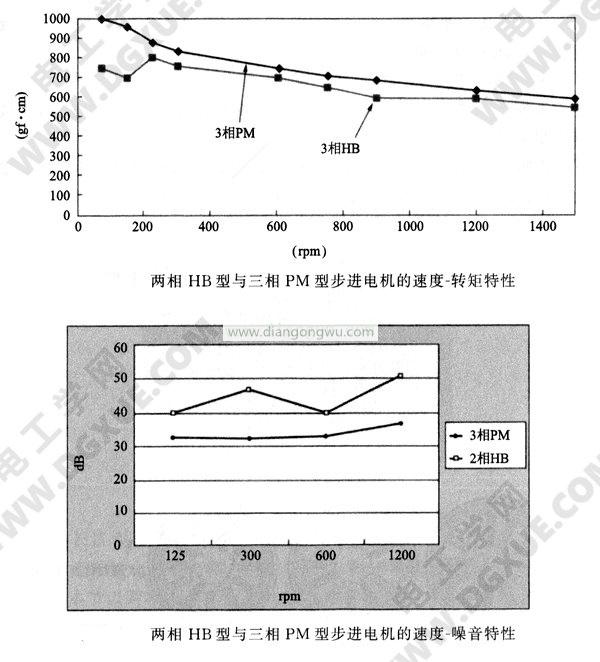
下表为试验电机参数,即相同尺寸的两相HB型与三相PM型步进电机的参数。
下图为两种电机的速度—转矩特性及其速度-噪音特性:
速度—转矩特性两者相差不多,三相PM型电机的噪音特性约低10dB。在分辨率和寿命及其成本都能满足要求时,三相PM型电机较两相HB型电机振动噪音更低。