建立直角坐标系,如图所示,和分别为AB和CD的初始角,各杆长度分别用矢量和表示。将各矢量分别在轴和轴投影,得到投影方程


在上述方程中消去并整理,可得与之间的函数关系

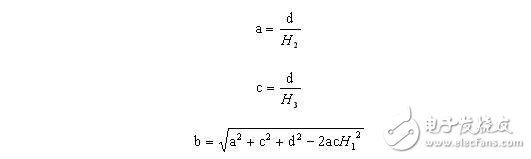
在上式中令:

通过化简可得到:

将两连架杆对应的参数分别代入到方程得到,再根据其他条件选定机架长度,据此,可求出其余杆的长度
有了小车的驱动结构和转向结构,将小车其他零件装配好,可得到小车的装配图,如图三:
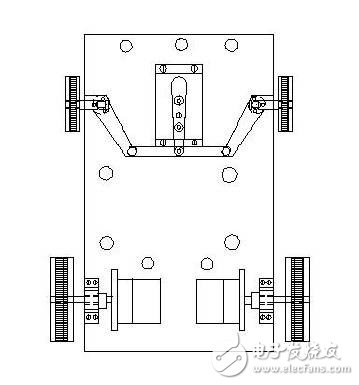
图三:小车整体装配图
2、电路部分总体方案
智能小车采用52单片机作为控制器,通过控制电路控制舵机转向和直流减速电机的转速、转动方向,使小车能够走直线和转弯。运用集成的红外对管GP2A25来巡线,安装在车子前方,并排安装三个,采集路面信号反馈给单片机,再由单片机控制电机的转动和方向的调整,从而达到巡线的效果。整个小车还采用金属传感器来识别小车巡线上的金属。
整个小车的结构图如图四所示:
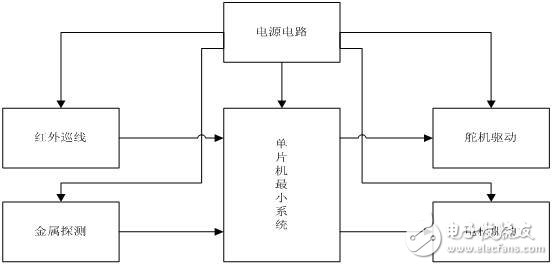
图四:电路部分总方案图
下面分别讨论以上五个模块。
2.1、单片机最小系统
单片机要能够工作,必须加上晶振和复位电路,如果用到P0口的话还得给其加上上拉电阻,保证通电后P0为高电平。另外还得有给单片机烧写程序的下载器,这个老师已给。单片机是此电路的核心部分。设计采用的52单片机,其工作电压为5V(20引脚接5V,40引脚接地)。单片机根据程序输出逻辑电压从而完成控制作用。本设计使用单片机的P0.5到P0.7引脚来作为红外巡线的反馈控制引脚。P0.4为金属传感器的控制端口,只可惜时间上不允许我们把金属探测的功能做出来。P2.0到P2.3,为直流减速电机的控制线接口,能控制左右电机的正转、反转和停转;P2.4和P2.5为电机的使能端接口,分别控制左右电机的转速。P2.6为舵机的控制线接口,通过控制占空比来控制舵机的转向及转角大小。电路图如图五: