今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从详细解读CAN总线原理和数据帧问题,适用于低信噪比信道的aos数据帧结构及其解帧方法与这几个方面来介绍。

接口,总线,驱动相关技术文章详细解读CAN总线原理和数据帧问题
先看看工作原理
当 CAN 总线上的一个节点(站)发送数据时,它以报文的形式广播给网络中所有节点,对每个节点来说,无论数据是否是发给自己的,都对其接收。
每组报文开头的11 位字符为标识符,定义了报文的优先级,这种报文格式成为面向内容的编制方案。同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文,当几个站同时竞争总线读取时,这种配置十分重要。
大体的工作原理我们搞清了,但是根本的协议我们还要花一番功夫。下面介绍一个重要的名词,“显性”和“隐性”:
在我看到的很多文章里,有很多显性和隐性的地方,为此我头痛不已,最终我把它们彻底弄明白了。
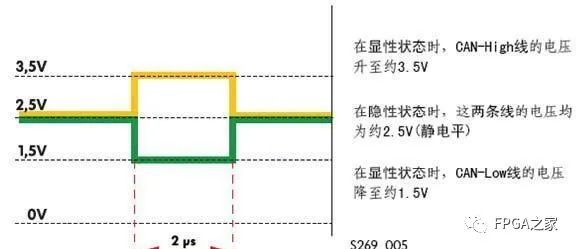
首先 CAN 数据总线有两条导线,一条是黄色的,一条是绿色的------分别是CAN_High 线和CAN_Low 线,当静止状态时,这两条导线上的电平一样,这个电平称为静电平,大约为2.5 伏。
这个静电平状态就是隐形状态,也称隐性电平,也就是没有任何干扰的时候的状态称为隐性状态。当有信号修改时,CAN_High 线上的电压值变高了,一般来说会升高至少1V;而CAN_Low 线上的电压值会降低一个同样值,也是1v。
那么这时候,CAN_High 就是 2.5v+1v=3.5v,它就处于激活状态了。而CAN_Low 降为2.5v-1v=1.5v。可以看看这个图
由此我们得到
在隐性状态下,CAN_High 线与CAN_Low 没有电压差,这样我们看到没有任何变化也就检测不到信号。但是在显性状态时,改值最低为2V,我们就可以利用这种变化才传输数据了。所以出现了那些帧,那些帧中的场,那些场中的位,云云。
在总线上通常逻辑1 表示隐性。而0 表示显性。这些1 啊,0 啊,就可以利用起来为我们传数据了。利用这种电压差,我们可以接收信号。
一般来说,控制单元通过收发器连接到 CAN 驱动总线上,这个收发器(顾名思义,可发送,可接收)内有一个接收器,该接收器是安装在接收一侧的差动信号放大器。然后,这个放大器很自然地就放大了CAN_High 和CAN_Low 线的电平差,然后传到接收区。如下图