今天小编要和大家分享的是工业控制相关信息,接下来我将从舞蹈机器人直流电机和舵机电机驱动系统的设计方案,agv物流分拣机器人轮毂电机bl18060麦克纳姆轮无刷电机这几个方面来介绍。

工业控制相关技术文章舞蹈机器人直流电机和舵机电机驱动系统的设计方案
机器人舞蹈比赛是一项具有极强观赏性和趣味性的比赛。比赛规则要求参赛机器人在有限的场地和时间内,配合音乐完成动作。由于要求机器人既要充分利用场地,又不能超时和越界,因此,舞蹈机器人集成了多学科前沿技术,它的设计涉及了机电一体化技术、检测和传感技术、精密机械加工和精密机械传动技术、现代化控制技术和管理技术、计算机程序控制技术等多个方面。
舞蹈机器人之所以能完成各种流畅的动作,在于它身体各运动部位都装有相应的动力源(驱动电机)。目前在舞蹈机器人中常用的电机有三类:直流电机、舵机和步进电机。其中直流电机功耗低、力矩大,通常用于闭环控制系统;舵机控制精确、力矩较小;步进电机控制精确、功耗较大、力矩较小,通常用在开环控制系统。根据上述比赛规则要求,本文介绍的机器人选用了直流电机和舵机两类电机,文中重点讲述了这两类电机驱动系统的设计方法。
1、系统构成
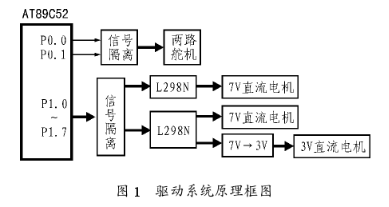
系统中,直流电机共有四路,分别用于机器人底盘、头部的转动以及身体的升降,舵机有两路,用于花瓣打开。本设计从实际出发对不同电机采取了不同的驱动方式。舵机驱动电流仅十几微安,可以直接使用单片机端口进行驱动,而直流电机工作电流较大,瞬态电流接近1A,因此需要采用专用电机驱动芯片。此外由于采用了3V与7V两种规格的直流电机,其中7V直流电机驱动信号直接采用驱动芯片输出,3V直流电机则需对驱动芯片输出作降压处理,因此,控制芯片选用了Atmel公司的AT89C52单片机。图1是本驱动系统的原理框图。
2、主要模块的硬件设计
本驱动系统主要由信号隔离模块、舵机驱动模块、直流电机驱动芯片和降压模块等部分组成。
2.1 信号隔离模块