今天小编要和大家分享的是工业控制相关信息,接下来我将从采用双闭环伺服控制方式实现生物芯片点样仪的软硬件电路设计,pid电路原理及在实验中的应用ppt这几个方面来介绍。

工业控制相关技术文章采用双闭环伺服控制方式实现生物芯片点样仪的软硬件电路设计
1、 引言
生物芯片点样仪是制备生物芯片的关键设备。点样仪一般为三自由度直角坐标运动系统,主要用于将物生样品(蛋白、核酸等)精确定位、定量的分配在玻片上。根据实际需要提出该系统的主要技术指标为:定位精度:±5μm;运动速度:150mm/s。
2、 硬件设计
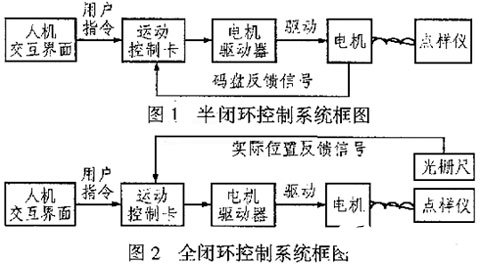
PID控制是根据偏差的比例(P)、积分(I)和微分(D)进行控制的一种技术,是目前高精度控制系统中通常采取的一种方式。根据要求可采用的控制方式有半闭环控制(控制框图见图1)和全闭环控制(控制框图见图2)两种。采用半闭环控制时,反馈信号来自于安装在电机轴上的编码器,但此时系统不能反应反馈回路外的误差。而采用全闭环控制时,其反馈信号来自于安装在运动轴上的光栅尺,由于全闭环控制时闭环伺服系统直接以工作台的最终位置为目标,从而消除了进入传动系统的全部误差,所以精度较半闭环系统要高(理论上,系统精度取决于光栅尺的精度)。但由于闭环伺服系统检测的是运动轴的位移量,其各个环节都包括在反馈回路中,影响因素多而复杂,易造成系统运行不稳定。
综合上述两种方式的优缺点,决定采用一种双闭环的伺服控制策略来兼顾系统的稳定性与精度。该双闭环控制系统如图3所示,系统中包括了由光栅尺组成的全闭环主回路和由编码器组成的半闭环辅助回路。通过对不同产品的分析比较,最后,其运动系统选用交流伺服电机加精密滚珠丝杠的结构;控制系统选用Galil公司的DMC - 1800PCI卡;位置反馈选用英国Renishaw精度为1μm的光栅尺。
DMC - 1800PCI总线多轴运动控制器为Galil公司产品,它要占用PC机中的一个PCI插槽。它用32位MCU控制1~8轴伺服电机或步进电机或二者组合,同时包括12MHz伺服编码器反馈信号、2MHz步进电机命令、带速度及加速度前馈、积分限制、Notch及低通滤波器的PID等,采样周期62.5μs/轴。运动方式有JOG、PTP定位、直线、圆弧插补、轮廓、电子齿轮、ECAM等;此外,它还带有双编码器反馈、回零、正、反向限位输入接口及8通道通用模拟输入等。