今天小编要和大家分享的是步进马达分类 步进马达运转特性,接下来我将从步进马达的分类,步进马达的运转特性,步进马达的使用特性,步进马达的特性,步进马达的励磁方式,这几个方面来介绍。
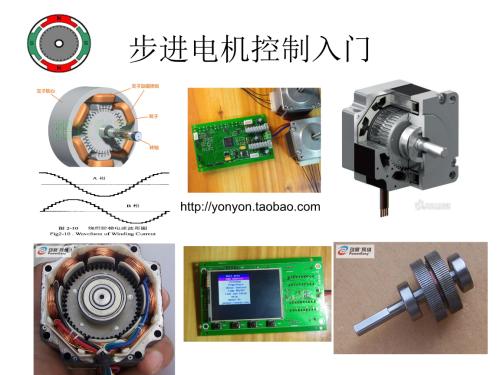
步进马达的分类步进马达的种类依照结构来分可以分成三种:永久磁铁PM式(permanent magnet type)、可变磁阻VR式(variable reluctance type)、以及复合式(hybrid type)。一、永久磁铁PM式(permanent magnet type)PM式步进马达的转子是以永久磁铁制成,其特性
步进马达的分类
的种类依照结构来分可以分成三种:永久磁铁pM式(permanentmagnettype)、可变磁阻VR式(variablereluctancetype)、以及复合式(hybridtype)。
一、永久磁铁pM式(permanentmagnettype)
pM式步进马达的转子是以永久磁铁制成,其特性为线圈无激磁时,由於转子本身具磁性故仍能产生保持转矩。pM式步进马达的步进角依照转子材质不同而有所改变,例如铝镍钴系(alnico)磁铁转子之步进角较大,为45°或90°,而陶铁系(ferrite)磁铁因可多极磁化故步进角较小,为7.5°及15°。
二、可变磁阻VR式(variablereluctancetype)
VR式步进马达的转子是以高导磁材料加工制成,由於是利用定子线圈产生吸引力使转子转动,因此当线圈未激磁时无法保持转矩,此外,由於转子可以经由设计提高效率,故VR式步进马达可以提供较大之转矩,通常运用於需要较大转矩与精确定位之工具机上,VR式的步进角一般均为15°。
三、复合式(hybridtype)
复合式步进马达在结构上,是在转子外围设置许多齿轮状之突出电极,同时在其轴向亦装置永久磁铁,可视为pM式与VR式之合体,故称之为复合式步进马达,复合式步进马达具备了pM式与VR式两者的优点,因此具备高精确度与高转矩的特性,复合式步进马达的步进角较小,一般介於1.8°~3.6°之间,最常运用於OA器材如影印机、印表机或摄影器材上。
步进马达的运转特性
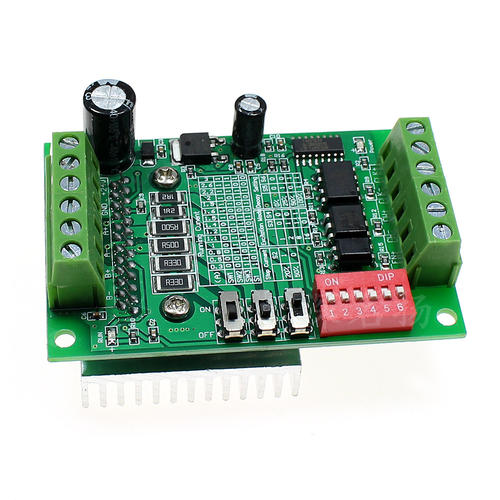
步进马达由微电脑控制器所控制,当控制讯号自微电脑输出後,随即藉由驱动器将讯号放大,达到控制马达运转的目的,整个控制流程中并无利用到任何回馈讯号,因此步进马达的控制模式为典型的闭回路控制(Closeloopctrol)。闭回路控制的优点为控制系统简洁,无回馈讯号因此不需感测器成本较低,不过正由於步进马达的控制为开路控制,因此若马达发生失步或失速的情况时,无法立即利用感测器将位置误差传回做修正补偿,要解决类似的问题只能从了解步进马达运转特性着手。
所谓失速是指当马达转子的旋转速度无法跟上定子激磁速度时,造成马达转子停止转动。马达失速的现象各种马达都有发生的可能,在一般的马达应用上,发生失速时往往会造成绕组线圈烧毁的後果,不过步进马达发生失速时只会造成马达静止,线圈虽然仍在激磁中,但由於是脉波讯号,因此不会烧毁线圈。
失速是指转子完全跟不上激磁速度而完全静止,失步的成因则是由於马达运转中瞬间提高转速时,因输出转矩与转速成反比,故转矩下降无法负荷外界负载,而造成小幅度的滑脱。失步的情况则只有步进马达会发生,要防止失步可以依照步进马达的转速-转矩曲线图调配马达的加速度控制程式。图10为步进马达之特性曲线,图中横座标的速度是指每秒的脉波数目(pulsespersecond)。与一般马达特性曲线最大的不同点是步进马达有两条特性曲线,同时步进马达可以正常操作的范围仅限于引入转矩之间。
步进马达的使用特性
一、便与控制:可根据控制器的程序所发出脉冲数量,来控制步进马达的旋转速度和运行角度,从而达到客户预期的目的。
二、高精度:一般步进马达的精度为步进角的3.5%,且不累积。步进马达不同于其他电机,不需要通过齿轮箱来转换,避免了功率的损失和齿轮箱所产生的角度误差。
三、锁定:步进马达通过控制脉冲个数来控制角位移量,当没有脉冲输入时,电机内部仍有电流存在,定子产生磁场通过磁场作用锁住转子,而且可以急停,任何角度锁定。
四、正反旋转:步进马达是通过脉冲来驱动,所以正反旋转只需要改变所输入脉冲的方向和相序来改变马达的运行方向。
五、寿命:步进马达的寿命比一般马达要长很多,步进马达是直接通过磁场作用来旋转,不会象其他电机要与电刷或齿轮产生机械摩擦,从而提高其寿命。
步进马达的特性
步进马达的特性说明如下:
1.步进马达必须加上驱动电路才能转动.驱动电路的信号输入端必须输入脉冲信号.若无脉冲输入时,转子保持一定的位置,维持静止状态;反之,若加入适当的脉冲信号时转子则会以一定的角度(称为步角)转动。所以如果加入连续脉冲时则转子旋转的角度与脉冲频率成正比;
2.步进马达的步进角一般为1.8度,即一周为360度,需要200步进数才能完成1转;
3.步进马达具有瞬间起动与急速停止的优越特性;
4.改变线圈励磁的顺序可以比较容易地改变马达的转动方向。
步进马达的励磁方式
步进马达的励磁方式有:一、l相励磁;二、2相励磁;三、l—2相励磁。
其中,1相励磁最为简单,转矩最小;2相励磁可有较大的转矩;1—2相励磁是属于半步进的方式,亦即每一步的旋转角度为前两项励磁的一半。
关于步进马达,电子元器件资料就介绍完了,您有什么想法可以联系小编。