光电编码器分类原理与特点
(一)光电编码器应用与原理
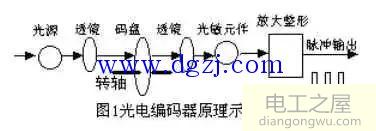
编码器为传感器类的一种,主要用来侦测机械运动的速度、位置、角度、距离或计数,许多的马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检测,所以应用范围相当广泛。光电编码器是利用光栅衍射原理实现位移和数字变换的,是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。从50年代开始应用于机床和计算仪器,因其结构简单、计量精度高、寿命长等优点,在国内外受到重视和推广,在精密定位、速度、长度、加速度、振动等方面得到广泛的应用。光电编码器是由光栅盘和光电检测装置组成,光栅盘是在一定直径的圆板上等分地开通若干个长方形孔,由于光电码盘与电动机同轴,电动机旋转时,光栅盘与电动机同速旋转,经发光二极管等电子元件组成的检测装置检测输出若干脉冲信号,其原理示意图如图1所示,通过计算每秒光电编码器输出脉冲的个数就能反映当前电动机的转速;此外为了判断旋转方向,码盘还可提供相位相差90º的两路脉冲信号。
(二)光电编码器主要分类
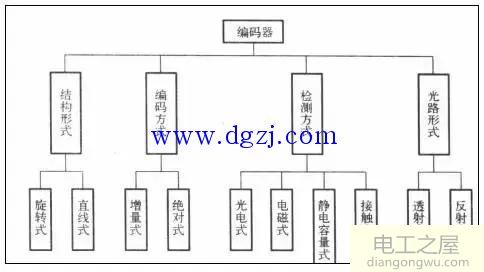
图2编码器的分类概览
按照机械结构形式分:
(1)旋转编码器:应用最为广泛,主要用于测量机械设备的角度、速度或者电机的转速。
(2)线性编码器:主要用于测量线性位移,又可以分为:
(a)拉线编码器:拉线编码器是拉线盒与旋转编码器的机械组合,通过拉线盒这种机械装置将机械设备的直线运动转化为圆周运动,从而可以使用旋转编码器进行测量线性位移。
(b)直线编码器:拉线编码器是拉线盒与旋转编码器的机械组合,通过拉线盒这种机械装置将机械设备的直线运动转化为圆周运动,从而可以使用旋转编码器进行测量线性位移。
按照电气输出形式分:
(1)增量型编码器:输出为周期性重复的信号,如方波或者正弦波脉冲。因此,可以分为方波增量型编码器和正余弦波增量型编码器。
(a)方波增量型编码器:是最常用的编码器之一,通过计算方波脉冲的数量和频率得出长度和速度。方波增量型编码器有电压型输出,如TTL(也称长线驱动、线驱动或RS422)和HTL(也称推挽输出或推拉输出)等,和开关型输出,如NPN开路集电极输出和PNP开路集电极输出。
(b)正余弦波增量型编码器:输出一般为1Vpp或者0.5Vpp的正弦波和余弦波,通过计算正余弦的幅值可以精确的细分出微小的角度。
(2)绝对值型编码器:输出则是代表着实际位置的特定的数字编码,不同的编码规则对应着不同的通信协议,也就是我们通常说的通信接口。
绝对值型编码器按照通信接口又分为:
模拟量(如,4-20mA电流型输出和0-10V电压型输出等)
并行口(如推挽输出和开路集电极输出等,每根线芯代表着二进制的一位数字)
串行口(如RS485,RS232, RS422等)
工业总线接口(如SSI, PROFIBUS, DeviceNet, CANOpen等)
工业以太网接口等(如PROFINET,Ethernet IP, EtherCAT, POWERLINK等)
绝对值型编码器按照圈数又分为:单圈绝对值型编码器和多圈绝对值型编码器;单圈绝对值型编码器可以确定一圈范围以内的角度,而多圈绝对值型编码器除了确定一圈范围以内的角度以外,还可以确定圈数。
按照检测工作原理分:编码器可分为光电编码器磁性编码器以及电感式编码器和电容式编码器等等。
按照机械安装方式分:编码器还可分为实心轴型和空心轴型,其中空心轴型又可分为盲孔型和通孔型。用于伺服反馈的编码器还常见锥孔型和锥轴型等安装形式。
按照适用环境分:编码器可以还分为一般工业型,重载型和防爆型等。
(三)旋转增量式和绝对式编码器特点
(1)增量式编码器特点:
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90度,从而可以方便地判断出旋转方向,而Z相位每转一个脉冲,用于基准点定位。增量式编码器转轴旋转时,有相应的脉冲输出,其计数起点任意设定,可实现多圈无限累加和测量。编码器轴转一圈会输出固定的脉冲,脉冲数由编码器光栅的线数决定。需要提高分辨率时,可利用 90 度相位差的A、B 两路信号进行倍频或更换高分辨率编码器。它的优点是原理构造简单,机械平均寿命可在几万小时以上,抗干扰能力强,可靠性高,适合于长距离传输。其缺点是无法输出轴转动的绝对位置信息。
(2)绝对式编码器特点
绝对式编码器是利用自然二进制或循环二进制(格雷码)方式进行光电转换的。绝对式编码器与增量式编码器不同之处在于圆盘上透光、不透光的线条图形,绝对编码器可有若干编码,根据读出码盘上的编码,检测绝对位置。编码的设计可采用二进制码、循环码、二进制补码等。绝对式编码器有与位置相对应的代码输出,从代码数大小的变化可以判别正反方向和位移所处的位置,绝对零位代码还可以用于停电位置记忆。
(四)旋转编码器脉冲示意图
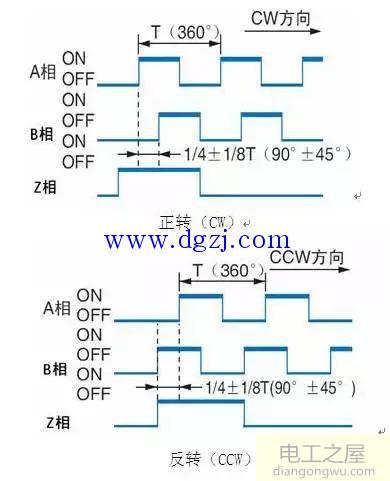
编码器轴每旋转一圈,A相和B相都发出相同的脉冲个数,但是A相和B相之间存在一个90°(电气角的一周期为360°)的电气角相位差,可以根据这个相位差来判断编码器旋转的方向是正转还是反转,正转时,A相超前B相90°先进行相位输出,反转时,B相超前A相90°先进行相位输出(如下图所示)。编码器每旋转一圈,Z相只在一个固定的位置发一个脉冲,所以可以作为复位相或零位相来使用。
(五)判断编码器好坏最简单方法
把编码器拆下来,在不断电的情况下,用手转动编码器,同时观察屏幕显示的数据,看有没有变动,如数据不变动,该编码器或其回路就是有问题的,如有变动,就证明该编码器是好的。