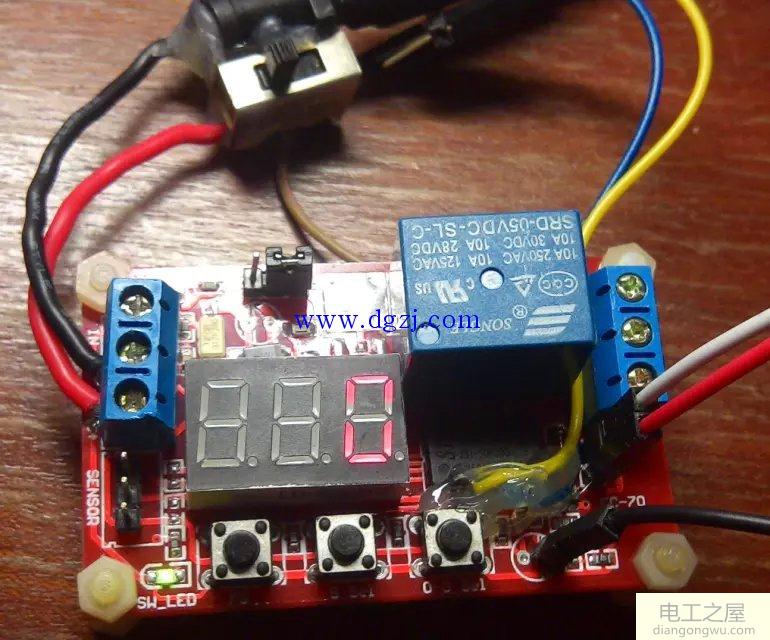
此继电器由一颗 STC15S204EA芯片为主构成,使用3位数码管(LD_3361AS)静态共阴极显示,带动松乐5V继电器工作。
其中输入电路使用317P280-1光耦做隔离,输出使用9012和S8550做继电器驱动。
整机功耗在50mA左右,输入电压在3.6-5V之间工作。可使用串口P11,P12写入程序。
STC15S204EA参数:CPU类型:单时钟8051兼容。内置时钟:33MHz,可通过内部设置调整工作频率。2-16bitTimer,256BRAM,4KROM,1KEEPROM。内置看门狗电路。8路10bitADC.5-ExtInt.不支持IAP,但支持ISP(串口编程)。
硬件原理图:
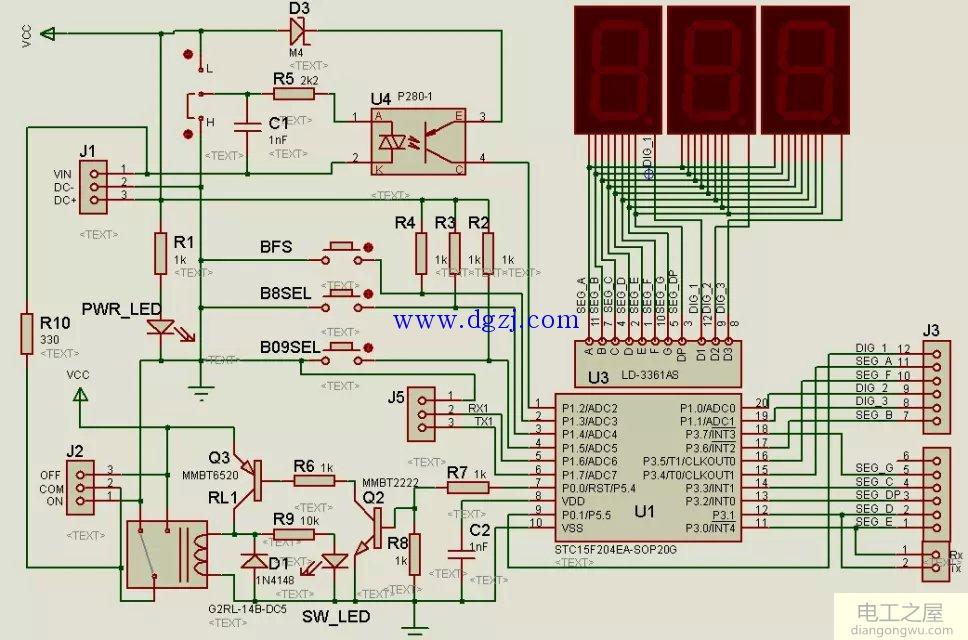
当前管脚分配:
Pin1(P1.2):外部触发输入信号(已经过光耦隔离).
Pin2_3_4(P1.3,P1.4,P1.5):按键检测端口,分别连接至功能选择,数码位选择,数字调整等3个功能。
Pin5_Pin6(P1.6,P1.7):闲置未用。用作监控信号输出,或该做串口使用。
Pin7(P0.0/P5.4):输出信号,用作继电器控制信号。
Pin8(VDD),Pin10(VSS):电源信号。
Pin11(P3.0/Rx),Pin12(P3.1/Tx):串口信号。可通过设置端口控制寄存器重新映射到未使用的端口P1.6/P1.7(Pin5/Pin6)
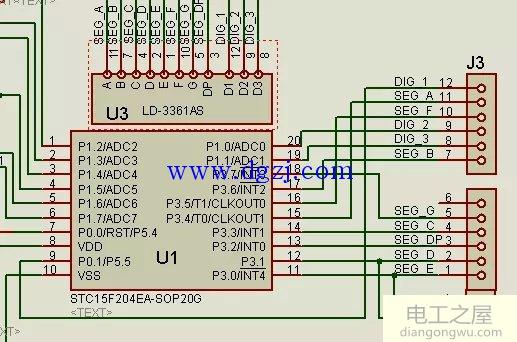
Pin9(P0.1/P5.5):数码管1阴极。
Pin19(P1.1):数码管2阴极。
Pin20(P1.0):数码管3阴极。
Pin15(P3.4):数码管字段A.
Pin17(P3.6):数码管字段B.
Pin14(P3.3):数码管字段C.
Pin12(P3.1):数码管字段D.
Pin11(P3.0):数码管字段E.
Pin16(P3.5):数码管字段F.
Pin18(P3.7):数码管字段G.
Pin13(P3.2):数码管字段DP.
在以上硬件连接的基础上,实现多步可重定义的开关定时开关功能。主要简述如下:
1. 系统时钟频率选择 :为了便于和PC通讯,以及和受控设备通讯,选择系统主频M=11.0592MHz。这样可以使用115200,n,8,1的串口参数与PC或受控设备通讯。
2. 定时中断的应用:
Timer0:用作显示扫描或串口通讯时的波特率发生器。用作显示扫描时,在11.0592MHz主频下,扫描频率设置到33Hz ,可消除人眼可见的闪烁。
Timer1: 用于定时(1ms准确定时),按键信号检测,输入触发信号检测等。在11.0592MHz主频下,扫描频率设置到4KHz,可以保证短时延时的准确性,输入触发信号的最高可分辨频率可达到100Hz。
3. EEPROM的应用
STC15F204EA的1K EEPROM按照512字节大小分为2个Bank。Bank0用来记录系统配置数据(程序初始化时写入,包括不同主频下的中断配置信息等),Bank1用来记录用户所需要的通断序列,每个动作序列由顺序号,继电器闭合时间,继电器断开时间,本动作重复次数等4个整数组成,共占8个字节。在512个字节内,可以存放最多63组动作(最后一个动作序列全0,表示动作结束)。
系统上电后,程序完成初始化动作,然后逐步从EEPROM中读出一个动作序列执行。用户可以控制在整个动作执行多少次以后,继电器停止动作,完全处于待机状态。也可以无限重复循环执行。动作时间以0.1s为时间基准,每个动作的时间长度可由0-6553.5s之间变化。
4. 用户数据的写入
在系统启动后,用户通过按键,进入与PC联机模式,然后用PC端给继电器写入要执行的动作序列。写入完成后,即可开始执行。
5. 与PC的实时通讯
因Timer0正常应用为LED显示控制,如果用户选择使用PC联机通讯,则把Timer0设置为波特率发生器(LED关闭),用户可以通过串口,直接将执行状态显示在PC上,随时执行停止或启动,或执行更长,更复杂的命令序列,并记录执行结果。因为STC15F204EA中仅一个UART通道,无法同时执行与被控设备通信和PC通讯,只能选择。
6. 关于外部触发的控制信号
因为该继电器使用了双向光耦作为输入与单片机引脚的隔离,而输入信号是直接与光耦的输入端相连,因此需要保证输入信号(需要让光耦中的LED工作,电流2-5mA)足够驱动光耦工作,否则结果不可靠。
7. 关于松乐5V继电器。
使用这个继电器的好处是使用单一5V电源就可工作,但是会对系统的电源稳定性造成影响。在继电器闭合器件,在电源上形成一个约2.5us的电源纹波(PP:3.8 - 6.3V)。如果在单片机设置上设置为4.05V自动复位,有可能导致系统自动复位。
8. 关于使用I/O管脚直接驱动LED显示
使用I/O驱动LED的好处是外围电路最为简单,但是增加了系统的电流负载。对于这种 共阴极LED数码管,需要输出较大的工作电流才能达到正常的显示亮度。因此使用了STC单片机的I/O模式控制寄存器PxM0,PxM1将输出模式设置为推挽输出方式。此时每个I/O管脚可提供20mA以上电流,但是在LED上需要串接一个330-470ohm的限流电阻,防止LED烧毁。
9. 定时的准确程度
该单片机使用内部RC振荡器工作,频率范围在5-33MHz(产品手册是35MHz,但不知如何设置到35MHz)内调节,精度1%以内。但是当I/O口工作与推挽模式,并且有电流输出时,I/O口的速度会降低很多,使得循环的定时精度极大变化,不能用作通用定时使用(工作频率越高,这个现象越明显)。
该单片机与51系列兼容性高,因此可以使用Proteus做完全仿真,比起每次把程序写进单片机看运行效果要方便很多。对于问题的Debug,大部分情况下,可以直接使用Keil C51下的模拟器进行,使用便捷有效。对于类似的小型应用系统,是一个很好的选择。
单片机控制的定时计数继电器 - 软件部分 这个 软件部分按照开发过程的顺序,分为显示部分、定时部分和外部触发信号的检测部分。
1. 显示驱动:
这个电路中使用的3位共阴极7段式LED(LD-3361AS)共11个管脚,经过网上搜索,查找了其基本电路连接关系。为了便于在Proteus中进行仿真,因此就利用Proteus元件库中带点的1位数码管3只,外加一个接口,自己构成了这个显示元件。这样就方便使用Proteus直接仿真运行。
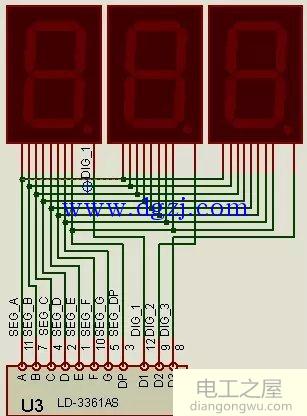
下一步是显示字模的组成。因为它的字段a-g与单片机P3口的连接顺序并不是按照P3.0-P3.7这样的顺序一一对应,因此,需要按照连接的顺序,建立在P3口上显示每个字符时的字模表。
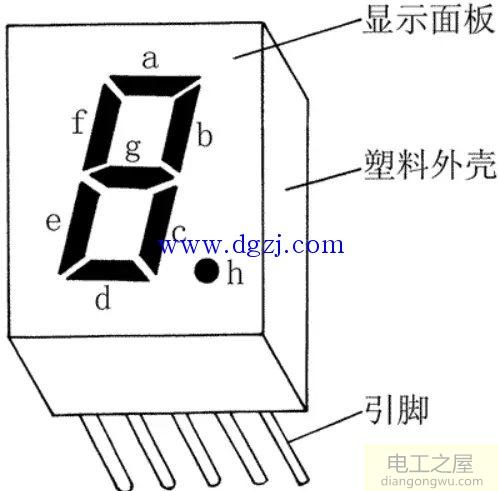
上图是一般7段数码管的笔画定义,如果要显示字符0,则需要a,b,c,d,e,f都要点亮,标记为1. 如果显示字符1,则需要b、c点亮即可。其它可显示的字符也是按照这个方法定义。因此,在这个实际电路中,字符的定义如下:
LED显示控制端口连接及字符字形定义:
/* 显示字符字模定义表
端口P3: 7 6 5 4 3 2 1 0
7SEG: G B F A C DP D E
字符 字码定义
0: 0 1 1 1 1 0 1 1 7B
1: 0 1 0 0 1 0 0 0 48
2: 1 1 0 1 0 0 1 1 D3
3: 1 1 0 1 1 0 1 0 DA
4: 1 1 1 0 1 0 0 0 E8
5: 1 0 1 1 1 0 1 0 BA
6: 1 0 1 1 1 0 1 1 BB
7: 0 1 0 1 1 0 0 0 58
8: 1 1 1 1 1 0 1 1 FB
9: 1 1 1 1 1 0 0 0 F8
a: 1 1 1 1 1 0 0 1 F9
b: 1 0 1 0 1 0 1 1 AB
c: 1 0 0 0 0 0 1 1 83
d: 1 1 0 0 1 0 1 1 CB
e: 1 0 1 1 0 0 1 1 B3
f: 1 0 1 1 0 0 0 1 B1
g: 1 1 1 1 1 0 1 0 FA
H: 1 0 1 0 1 0 0 1 A9
I: 0 0 1 0 0 0 0 1 21
J: 0 1 0 0 1 0 1 0 4A
K: 0 0 0 0 0 0 0 0 00
L: 0 0 1 0 0 0 1 1 23
M: 0 0 0 0 0 0 0 0 00
N: 0 0 0 0 0 0 0 0 00
o: 1 0 0 0 1 0 1 1 8B
P: 1 1 1 1 0 0 0 1 F1
Q: 0 0 0 0 0 0 0 0 00
r: 1 0 0 0 0 0 0 1 81
S: 1 0 1 1 1 0 1 0 BA //和5相同
t: 1 0 1 0 0 0 1 1 A3
u: 0 0 0 0 1 0 1 1 0B
v: 0 0 0 0 0 0 0 0 00
W: 0 0 0 0 0 0 0 0 00
X: 0 0 0 0 0 0 0 0 00
y: 1 0 1 0 1 0 1 0 AA
Z: 0 0 0 0 0 0 0 0 00
-: 1 0 0 0 0 0 0 0 80
_: 0 0 0 0 0 0 1 0 02
[: 0 0 1 1 0 0 1 1 33
]:0 1 0 1 1 0 1 0 5A
~: 0 0 0 1 0 1 0 0 14 //表示错误字符。
字符表结束*/
转换成 C语言的标准定义如下:
static unsigned char code CharCode[] = {0x7B, 0x48, 0xD3, 0xDA, 0xE8, 0xBA, 0xBB, 0x58, // 0 - 7
0xFB, 0xF8, 0xF9, 0xAB, 0x83, 0xCB, 0xB3, 0xB1, // 8 - f
0xFA, 0xA9, 0x21, 0x4A, 0x00, 0x23, 0x00, 0x00, // g - N
0x8B, 0xF1, 0x00, 0x81, 0xBA, 0xA3, 0x0B, 0x00, // o - v
0x00, 0x00, 0xAA, 0x00, 0x80, 0x02, 0x33, 0x5A, // w - z,-, _, [, ],
0x14}; //~.
不过,在上表中,有不少是用0x00表示的,表明这个字符用数码管无法显示,因此全部灭掉,变成空白了。如果你要显示W,M,N,K,V,X,Z ,....都无法显示的。因此在使用时,尽量避免用到以上的显示内容。但是常用的如:”Start“,Hlt,Stop End ”0-9“,”A-F“等都可以正常显示。
在字模表定义好以后,就要显示两类信息,一类是字符串,另一类是整数数字。我们通常使用的字符串是用ASCII(American Standard Code for Information Interchange, 美国标准信息交换码)码表示的,并不是我们这里的字模。因此需要把常用的ASCII字符串,转换成所需要显示对应的字模数据,然后把字模数据再放到对应的P3端口上,就可以在数码管上显示出来了。
下面是ASCII字符到字模表的转换过程。
1. 首先定义了一个显示缓冲区,就是PC里面的显存。把要显示的内容放到显存中,然后由显示程序自动显示出来就好了。因为这个数码管只有3位,无法显示很多内容,因此这里的显存仅定义为10个字节。其中8个字节可以用来显示内容,另外2个字节用作循环时的间隔符使用。在这个基础上,最多显示的字符长度是8位ASCII码,对应于数字,则最大是99999999。超过这个范围的显示内容,会被处理掉而不予处理。
#define BUFLEN 10 //显示缓冲区, 显示起始指针和终止指针,要显示的数据的长度(1-8)。
unsigned char DispBuf[BUFLEN]; //数据长度8位,加2位隔离空格
unsigned char DISPLEN; //要显示的数据的长度,1-8.
2. 将单个 ASCII字符转换为LED对应的字模代码。其中CharCode[]就是前面定义的字模表。
unsigned char CChar(char c)
{
unsigned char i;
if (c >= '0' && c 9') i=c-'0';
else if (c >='A' && cZ') i=c-'A'+10;
else if (c >='a' && cz') i=c-'a'+10;
else if (c == '-') i=36;
else if (c == ' ') i=35; //空格
else if (c == '_') i=37;
else if (c == '[') i=38;
else if (c == ']') i=39;
else i=40; //其它字符全部转换为小数点
return CharCode;
}
这个转换过程比较简单,就是将ASCII字符与0-9,A-Z, a-z分别比较,然后找到位置值,转换到字模表中的顺序值,最后返回字模表该位置对应的字模值即可。因此无法区分大小写,识别主要靠想象力了。
3. 显示字符串的程序是显示的一个核心部分。因为只能显示3位,因此当要显示的长度不超过3位时,靠右显示。前面显示为空白(不显示)。而对于超过3位长度的部分,则是按顺序存放在显存中,由显示程序自动显示(显示程序后面介绍)。
void Disp(char *str)
{
unsigned char i;
DISPLEN =sLen(str);
if (DISPLEN==1) { //长度为1,前面2个空白,最后一个数值。
DispBuf[2]=CChar(str[0]);
DispBuf[1]=0;
DispBuf[0]=0;
DISPLEN=3;
} else if (DISPLEN ==2) { //长度为2,前面1个空白,后面两个数值。
DispBuf[1]=CChar(str[0]);
DispBuf[2]=CChar(str[1]);
DispBuf[0]=0;
DISPLEN=3;
}
else
for (i=0;i//显示区的最大长度是8,最后增加2个0,作为空格,隔离循环显示。
for (i=DISPLEN;i10;i++) DispBuf=0;
//如果dCount =0, 则立即开始刷新(Timer0的下次中断开始就刷新)。
//否则等这次正常显示完成才刷新。可能会丢失部分显示内容,但是看着正常。
dCount=0;
}
上面用到了一个字符串长度函数sLen。因为不想使用C标准库,因此自己定义这个函数,并且限定最大长度是8。
unsigned char sLen(char *str)
{
unsigned char i=0;
while(*str != 0) {i++;str++;}
if (i>8) i=8; //获取字符串长度,不大于8。大于8时等于8.
return i;
}
4. 对于长整数的显示。范围 0 - 9999,9999。虽然程序内部能够处理无符号长整数(0-2(32)范围),但是显示时只处理这个较小的范围。
/*--------------------------------------------------------------------------------------------
无符号长整数显示程序
限制:只能显示8位,否则显示 OFL - 表示 Overflow,溢出。
----------------------------------------------------------------------------------------------*/
void DispLInt(unsigned long m)
{
unsigned long i;
unsigned char j,k;
unsigned char Res[8];
//对于超大数据的处理,显示“---”,闪烁。OFL
if (m>99999999) {
DispBuf[0]=0x8B; // O
DispBuf[1]=0xB1; // F
DispBuf[2]=0x23; // L
DISPLEN = 3;
return;
}
//将整数转换成十进制字符数组Res[], 如873245转换成{'8','7','3','2','4','5'}。
i=m/10;
j=m%10;
k=0;
Res[k]=j;
while(i>0) {
j=i%10;
i=i/10;
k++;
Res[k]=j;
}
//对于仅1位数字的显示,前面填充2个空格,最后一位显示数字。
if (m10) {
DispBuf[0]=0;
DispBuf[1]=0;
DispBuf[2]=CharCode[Res[0]];
DISPLEN=3;
}
//对于2为数字显示,前面填1个空格,后面两位填数字。
if (m >=10 && m100) {
DispBuf[0]=0;
DispBuf[1]=CharCode[Res[1]];
DispBuf[2]=CharCode[Res[0]];
DISPLEN=3;
}
//对于3位及以上的数字处理。按照顺序填充在显存中。
if (m>=100) {
for (j=k;j>0;j--) DispBuf[k-j]=CharCode[Res[j]]; //uchar i-- 会导致死循环,无法停下来的。
DispBuf[k]=CharCode[Res[0]];
DISPLEN=k+1;
}
if (k3) k=3;
//对于长度超过3位的数字,需要循环显示,并且在需要循环显示的缓冲区中增加两个空格(0)。
DispBuf[k+1]=0;
DispBuf[k+2]=0;
//是否需要立即刷新?影响显示的美观程度。
dCount = 0;
}
至此,要显示的内容存放到显示缓冲区的工作已经完成。剩下就是如何把显示缓冲区的内容放到P3端口上,让LED数码管点亮了。这里为了让程序独立的工作,使用了Timer0服务中断作为定时扫描显示使用。
5. LED的扫描频率设定。因为使用I/O口直接驱动LED的管脚进行显示,因此任何时候,都只可能在3个数码管中,仅有一个是点亮的。但是因为人眼的视觉暂留现象,我们看到多次循环扫描点亮后的数码管是一直亮着的。根据电影和电视的显示频率来看,一般每个数码管最少扫描频率在24次/秒以上时,才能感觉到一直亮着。扫描频率再低时,就会感觉到数字在闪烁。
另外,因为我们要显示的字符最多是8位,因此每3个字符显示一段时间后,必须移动一下,流水形式显示下一位,这个流水的速度不能太快,太快了一样会感到字符闪烁。因此,根据感受,这个移动的频率在1.5-2次/秒左右。这就是下面确定扫描程序的频率的依据。
为了精确确定扫描的周期,使用系统定时器Timer0作为基准。
另外,因考虑到后期还会使用Timer0复用做UART通讯时的波特率发生器,因此选择系统的主时钟在11.0592MHz或大于它的0.5倍的整倍数。这样可以较为精准的产生115200Baud的通讯速率。这里选择基准时钟为11.0592MHz(因STC15F204EA使用内部RC振荡器工作,会有0.2%以内的实际误差)。
Timer0的初始化如下:
/*------------------------------------------------
定时器中断程序/用于显示
------------------------------------------------*/
void Init_Timer0(void)
{
TMOD |= 0x01; //定时模式1,16位定时方式
TH0=0xEE; //定时器初值: 11.0592MHz晶振, 中断周期5ms
TL0=0x04;
PT0=1; //Timer0中断优先
EA=1; //总中断打开
ET0=1; //定时中断打开
TR0=1; //定时开始
cp=0;
dispPtr =0; //显示位置指针清零
TIMER0INIT=1; //TIMER0初始化标志,其它地方用到。
}
/*-------------------------------------------------------------------------
显示服务中断:TIMER0_ISR
说明: LED的刷新频率在30Hz以上时,没有闪烁感。 此时中断的刷屏频率要大于90Hz。
在时钟M=11.0592MHz时,TH0=0xEC,TL0=0x04即可。
--------------------------------------------------------------------------*/
void Timer0_isr(void) interrupt 1
{
unsigned char t;
unsigned char i;
TH0=0xEE; //0xFD,0x57 :32.954MHz --->2.00527KHz
TL0=0x04; //0xFA,0xB0 :32.954MHz --->1.00686KHz
cp++; //cp为刷新周期计数,每中断几次,刷新一次。如果系统主频很高,此时的刷新频率数值可以调整到更大。
if (cp == LED_REFRESH_FREQ) { //5ms * 4 = 20ms LED_REFRESH_FREQ 拖过调整显示延迟常数,
cp =0;
dispPtr++; //显示指针指向下一个要显示的字段
if (dispPtr ==1) { //显示第一位,先关闭上一个显示位,更新要显示的数值,然后打开要显示的字段。实际显示时间等于2次中断的间隔。
DIG_3=LED_OFF;
P3=DispBuf[dispPtr-1];
DIG_1=LED_ON;
}
if (dispPtr ==2) {//显示第二位,做法同上。
DIG_1=LED_OFF;
P3=DispBuf[dispPtr-1];
DIG_2=LED_ON;
}
if (dispPtr ==3) {//显示第三位,完成后把显示指针dispPtr变成0,表示一次显示完成。
DIG_2=LED_OFF;
P3=DispBuf[dispPtr-1];
DIG_3=LED_ON;
dispPtr=0;
}
dCount++; //是否要做流水移动的计数器。这里每刷新50次,移动一次。移动频率=(单字刷新频率*3)/50,约1.8-2.0Hz
if (dCount>50 && DISPLEN>3) { //循环次数,每个位置显示相同次数后,开始更新下一轮字符。字符移位开始。
//在两次循环中间插入段行识别2个空格或上划线? 否则首尾相连无法识别。
dCount=0; //流水移动计数器清零
t=DispBuf[0]; //保存显存中的第一位
for (i=0; i1;i++)
DispBuf=DispBuf[i+1]; //循环引动第2位到DISPLEN+1位,向前移动一位
DispBuf=t; //将第一位补在循环队列的尾部
}
}
}
经过以上动作,数据就可以正常在LED上显示了。
6. Timer0参数设置,主频与中断频率的测量值。
对于STC15F204EA的Timer0, 其它主频下可参照调整。具体的测试数据如下(使用P1.7端口电平翻转进行测量的实际频率,非计算值):
当TH0=0xEE, TL=0x11时,主频变化与P1.7的端口翻转频率的关系如下:
32.958MHz 输出:298.82Hz
5.995MHz 输出:54.375Hz
12.011MHz 输出:108.955Hz
19.966MHz 输出:181.082Hz
23.980MHz 输出:217.476Hz
29.988MHz 输出:271.944Hz
当系统的主频固定设置到33MHz(实际值32.950MHz)时,定时参数设置对输出频率的变化:
TH0=0xFF, TL0=0x01 :5.307KHz
TH0=0xEF TL0=0xA0 :327.236
TH0=0xF6 TL0=0xA0 :571.172
TH0=0xF6 TL0=0x00 :535.521
TH0=0xF5 TL0=0x00 :486.952
TH0=0xF5 TL0=0x40 :498.271
TH0=0xF5 TL0=0x48 :499.761
TH0=0xF5 TL0=0x4A :500.080
TH0=0xCA TL0=0x62 :100.006
TH0=0xE5 TL0=0x33 :200.000
TH0=0xEA TL0=0x90 :250.040
TH0=0xEE TL0=0x23 :300.040
TH0=0xF2 TL0=0x9C :400.043
在主频固定设置在M=11.0592MHz, 并且同步打开Timer1 ON(4KHz速率中断,轻负载)时,TH0,TL0与输出频率的关系如下:
TH0, TL0, 翻转频率
0xF2, 0x9C, 134.267Hz
0xEE, 0x04, 100.003Hz LED_REFRESH_FREQ=2时,LED闪烁,LED_REFRESH_FREQ=1, 则不再闪烁。
0xE2, 0x08, 60.016, LED_REFRESH_FREQ=1,轻微闪烁。
0xE8, 0x03, 75.000, LED_REFRESH_FREQ=1.
0xEC, 0x04, 89.904, LED_REFRESH_FREQ=1, 此时单个字的刷新周期为29.994Hz(实际测试值)。
这些测量数据和计算值之间有一定的差距。特别是当显示的负载增大时,点亮LED和不点亮LED的中断速率是不一样的。实际使用时,如果需要准确的数据,最好用示波器测量实际值为准。
7. LED的显示亮度问题。
对于普通的51单片机,无法直接驱动共阴极LED数码管直接显示。因此需要将端口设置为推挽输出模式。
//关闭所有显示。
LED_Init();
//STC单片机特殊寄存器 PxM0,PxM1设置工作状态。 M1M0=01 推挽式输出,可以直接点亮LED。但是需要增加470ohm分压电阻限流。
P3M0=0xFF;
P3M1=0x0;