今天小编要和大家分享的是升压斩波电路,斩波电路,pid相关信息,接下来我将从升压斩波电路PI和PID调节器的优化设计,升压斩波电路pi及pid调节器的优化设计.pdf这几个方面来介绍。

升压斩波电路pi及pid调节器的优化设计.pdf
1、引言
升压斩波电路在各类电力电子电路中的应用十分广泛,它将低压直流电变为高压直流电,为负载提供了稳定的直流电压。升压斩波电路的PI和PID调节器的性能对输出的电压影响很大。由于这种斩波电路工作于开关模式下,是一个强非线性系统。虽然可以利用状态方程和边界条件求出任意一次开关的输出量,但对于系统分析十分不便。
以下利用状态空间平均法和小信号模型对升压斩波电路PI和PID调节器参数的优化设计进行进一步的分析,并给出了MATLAB仿真结果和实验波形。
2、升压斩波部分模型的建立
对于升压斩波电路而言,其主电路可分为输入滤波部分和升压斩波部分。为便于分析,只考虑升压斩波部分,其后的负载可以等效为一个负载电阻,因此升压斩波部分可以简化为图1所示电路。图中负载用电阻R代替。
此电路主要的工作状态有两种,即开关管导通模式和开关管关断模式,分别对应图2a和b。电路中的开关管和二极管工作在导通和截止两个状态,是一个强非线性系统。
为了简单起见,假定开关是理想的,同时认为状态转换是瞬间完成的。在电感电流连续的升压斩波电路中,设开关管导通的占空比为D,考虑到动态过程中占空比是变动的,特用小写D来表征。设开关周期为TS,电感L的等效内阻为R。
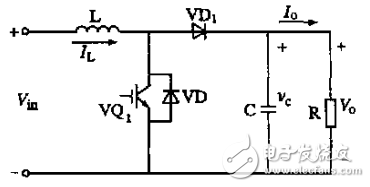
图1简化的升压斩波电路
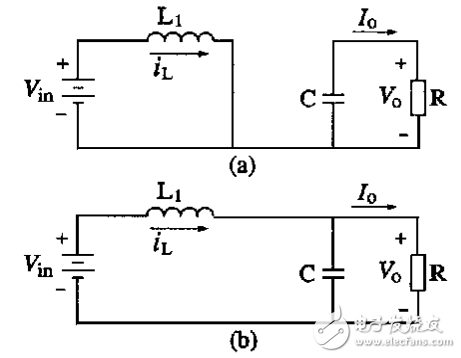
(a)开关管开通时的等效电路
(b)开关管关断时的等效电路
图2升压斩波电路两种工作状态的等效电路
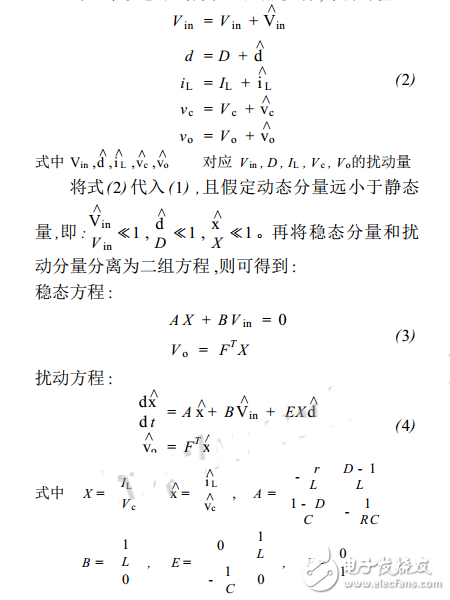
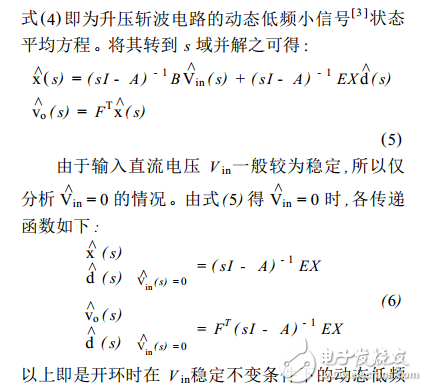
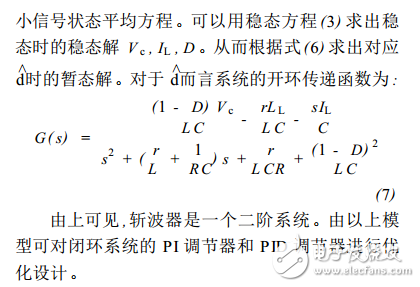
对于升压斩波电路的这两种开关状态,由状态空间平均法可得升压斩波电路的状态平均方程如下
对基本状态平均方程组施加扰动,令瞬时值:
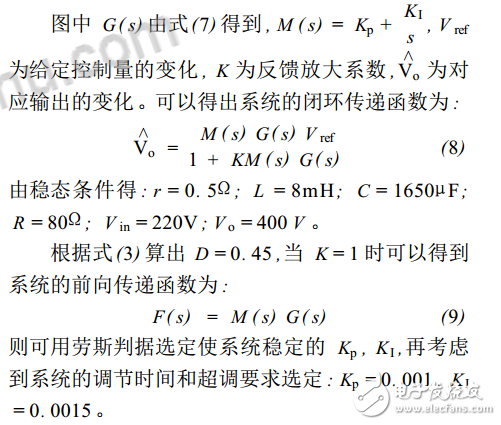
2.1、由PI调节器组成闭环
系统的闭环结构框图如图3:
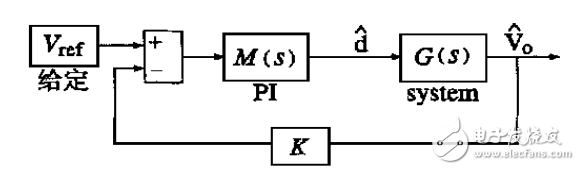
图3由PI调节器组成的系统闭环结构框图
2.2、由PID调节器组成闭环
系统的闭环结构框图如图4所示。
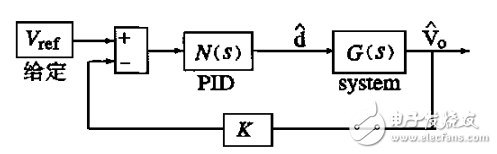
图4由PID调节器组成的系统闭环结构框图
图中N(S)=KDS+KP+KIS,为PID调节器的传递函数。其余与使用PI调节器相同。与上类似可以得到较优的调节器参数为:KP=0.001;KI=0.0015;KD=0.00004。由这些参数所得到的系统BODE图如图5所示。由BODE图可以看出,系统开环的频率特性较差。加入采用以上参数的PI调节器,改善了系统的相角裕度,同时也降低了系统在低频时的增益。而优化了的PID调节器进一步加大了系统的相角裕度。
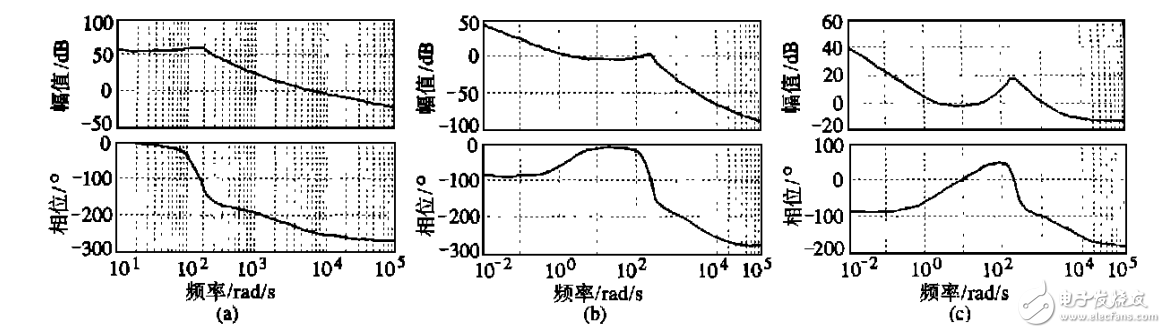
(a)开环系统的频率特性波特图(b)PI调节的系统频率特性波特图(c)PID调节的系统频率特性波特图
图5系统开环及使用PI及PID调节器时的频率特性
3、仿真结果和实验波形
3.1、仿真结果
PI与PID调节器以及系统的参数同上,将以上参数代入系统状态平均模型中并考虑负载变化和输入滤波环节,得到在负载变化时的Vo仿真波形如图6和图7。
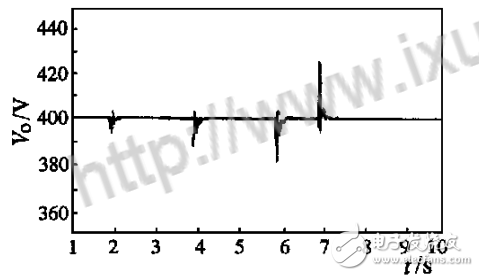
图6由PI调节器构成的闭环系统在负载波动时的输出电压Vo仿真波形
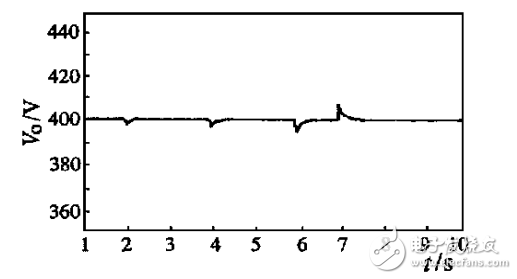
图7由PID调节器构成的闭环系统在负载波动时的输出电压Vo仿真波形
其负载变化情况为:T≤2S时R=1KΩ;2S《T≤4S时R=200Ω;4S《T≤6S时R=80Ω;6S《T≤7S时R=42Ω;T》7S时,R=100Ω。由仿真结果来看,在负载突增和突减的情况下,PI调节器的响应速度还是较快的,并且输出在负载变化时的波动也较小。使用PID调节与使用PI调节相比,在保证快速性的条件下进一步减小了Vo在负载突变时的波动。因此在这里使用了PID调节器。
3.2、实验波形
实验中使用DSPTMS320F240控制,升压斩波电路的开关频率为10KHz,输入电压220V,输出电压400V,电感为8MH,输出滤波电容为1650μF,带电阻负载。采用DSP数字控制精确设定调节器的最优参数后,针对数字控制系统的特点对调节器参数进行进一步优化。其输出Vo波形如图8和图9。
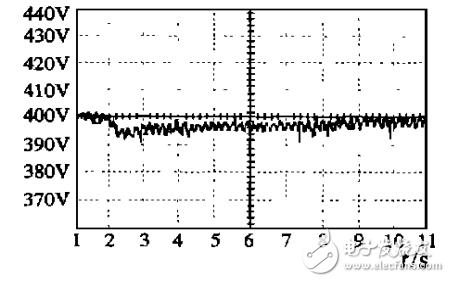
图8由PI调节器构成的闭环系统在负载变化时的输出电压Vo实验波形
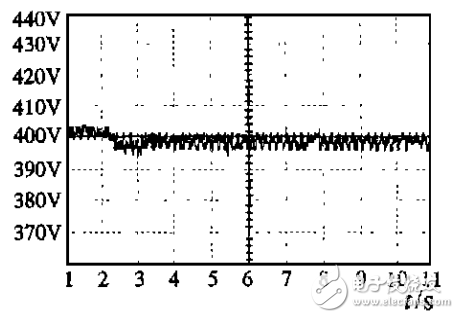
图9由PID调节器构成的闭环系统在负载变化时的输出电压Vo实验波形
图中,横轴坐标为1S/格,纵轴横坐标为20V/格。负载变化情况为R=80~40Ω。从实验结果来看,在同样的负载变化情况下,使用PID调节具有更短的调节时间,并且在负载突增时的电压降也更小一些。
4、结论
本文利用状态空间平均法以及小信号模型分析了升压斩波电路,并利用所得的模型,通过使用MATLAB仿真确定了升压斩波电路较优的PI和PID调节器参数。实验的结果也证明了PID调节优于PI调节,并且利用上述方法所选择的调节器的参数使调节器具有很好的动态性能和稳态性能。
关于升压斩波电路,斩波电路,pid就介绍完了,您有什么想法可以联系小编。