今天小编要和大家分享的是机器视觉,信号采集,单片机相关信息,接下来我将从机器视觉采集系统应用电路揭秘,那采集部分怎么整啊?这个代码段是我在网上找的,他们说可以,我就用了.这几个方面来介绍。

那采集部分怎么整啊?这个代码段是我在网上找的,他们说可以,我就用了.
视觉导航又叫做图像识别导航,它分为两种方式:一种是有线式,另一种是无线式。无线式的视觉导航技术是利用CCD在系统动态时摄取周围环境的相应的图像资料,并与设定的运行路径在信息数据库中进行比对,进而确定AGV当前地位置,进而经过控制模块对小车的运行路径进行实时的决策。第一种即有线式视觉导航技术是根据AGV现场的具体地面或者路边明显路标,经过车载的摄像装置(CCD)动态地获取路边的图像,再经过车载的计算机进行相应的处理,进而识别出路径的相应标识线,并且判断AGV与期望标识线的距离和与标识线的夹角,进而通过驱动系统控制AGV的实际行驶路径在与期望的路经保持在允许的范围内即可。
有线视觉导航技术的优点是:可以获取较大容量的信息、具体路径的设置与变化比较简单、系统具有较好的柔性等,而且具有现实应用的可行性和比较广阔的前景,是现今AGV的先进的导航技术和重要发展方向。车载摄像装置主要是由CCD摄像机、图像采集卡、光源等设备组成。摄像装置采集信息的电路原理图见下图:
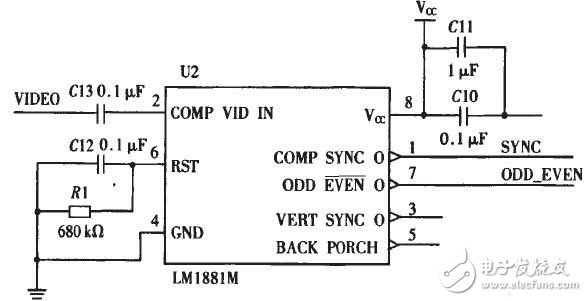
摄像头采集电路图
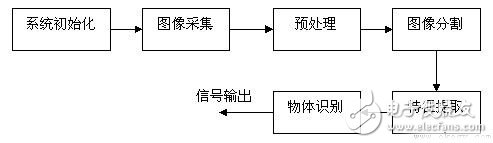
在视觉系统启动后,AGV的车载CCD摄像机就对小车前方的路径进行相应的图像采集,经过图像采集卡后,经过处理后送到相应的上位计算机。AGV的上位计算机经过对地面的信息进行适当图像处理(主要包括阈值处理、掩膜、直方图分析、图像分割、边缘检测、区域增长)与图象分析(主要包括特征摄取、物体识别、位置大小和方向以及图像其它物理特征的分析和较深度的信息处理),进而形成相应的控制指令,再传到车载计算机(单片机),进而控制AGV的相应的动作。视觉系统的工作原理的示意图:
关于机器视觉,信号采集,单片机就介绍完了,您有什么想法可以联系小编。