卧式加工中心配数控系统自动换刀机械手编程技巧
下面就XH756B系列卧式加工中心配SIEMENS802D数控系统时,在自动换刀过程中机械手的编程技巧作一介绍。
首先简单介绍一下刀具交换装置的基本情况,刀库是可正反向旋转的链式刀库、装在刀具交换装置上的机械手用15个步骤将刀库中的刀具交换到主轴,并将主轴刀具还回刀库对应的刀套中。为尽量缩短换刀时间,我们采用刀具预选与零件加工同时进行的方式来压缩换刀时间。机械手动作顺序如下:
步骤1:平移缩回,抓刀库中预选的刀具
步骤2:拔刀伸出,拔出刀套中的刀具
步骤3:平移伸出,离开刀库侧抓刀位置
步骤4:拔刀缩回,机械手缩回
步骤5:摇臂伸出,摇臂转向主轴侧
步骤6:平移伸出,抓主轴刀具
步骤7:拔刀伸出,拔出主轴中的刀具
步骤8:换刀正转或反转,刀具交换
步骤9:拔刀缩回,将预选刀具插入主轴
步骤10:平移缩回,机械手离开主轴
步骤11:摇臂缩回,摇臂转向刀库侧
步骤12:拔刀伸出,准备将主轴刀具送回刀库
步骤13:平移缩回,机械手移向刀库
步骤14:拔刀缩回,将主轴刀具插入刀库
步骤15:平移伸出,离开刀库侧抓刀位置。
以上15个步骤可分为如下4个阶段:
第1阶段:抓新刀。Txx代码控制刀库按就近方向转动到编程刀具所在的位置,到位且有刀库定位I信号后启动机械手,经过步骤1→步骤2→步骤3→步骤4,将编程刀具抓在手上等待换刀。
第2 阶段:换刀。M06启动换刀固定循环“TOOL”。“TOOL”控制各坐标移动到换刀位置,并用M90通知PLC启动换刀,PLC用M90信号请求NC “读入禁止”并启动机械手换刀步骤5→步骤6→步骤7→步骤8→步骤9→步骤10→步骤11,同时用步骤5的到位信号控制刀库转到主轴刀号的位置。
第3阶段:还刀。步骤5启动的刀库旋转停止且有刀库定位I信号后,启动机械手步骤12→步骤13→步骤14→步骤15,将主轴刀具还到刀库中并将记忆主轴刀号的存储器更新。步骤11完成后,取消“读入禁止”,激活刀具参数,加工程序和机械手还同时进行。
第4 阶段:抓预选新刀。在M06的下一段紧跟下道工序要用的刀具号Txx,刀库在完成还刀动作后可在零件加工的同时启动机械手步骤1→步骤2→步骤3→步骤 4,将下道工序所用的刀具预选抓到机械手上,等待M06启动后面的换刀动作,这样大大缩短了刀具交换的时间,提高了工作效率。
注意事项:
Txx和M06不能编在同一程序段内。在固定循环TOOL中,所有位移程序段应加G153(段有效)取消基本偏移。三个换刀过程为:①装刀:主轴无刀,Txx/M06直接安装编程刀具;②换刀:主轴有刀,交换编程刀具和主轴刀具;③还刀:主轴有刀,编程T0,将主轴刀具还回刀库。主轴准停角度利用PLC浮点参数MD14514[0]:$MN_USER_DATA_FLOAT[0]
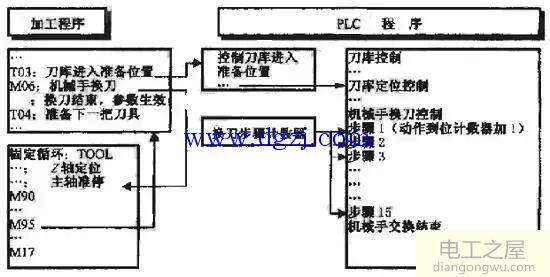
本编程方法的核心是将机械手动作按时序分成共15个步骤。“步骤”存储在一个中间的变量中,该中间变量点占一个字节,每个“步骤”完成后将中间变量的值修改为下一个“步骤”,而整个步骤全部完成后将中间变量置为零,下一个换刀指令到来后又从步骤1开始执行。这样不仅使PLC程序简单、直观,而且由于“步骤” 是唯一的,这样就能避免信号之间的互相干扰,编程人员再也不用绞尽脑汁来为每一个输出信号加各种限制条件,巧妙利用“变量”达到事半功倍的效果。加工程序和PLC程序关系见下图。
此外,刀库运转、托盘交换等也可以用这种方法来编程。