如下图(a)为相内磁路,主磁极共有mP个,由于节距相等,相邻相的A相和B相之间的节距①为360°/mP。当A相通激磁电流时,其磁极与转子极性相反的齿相对应,当再给B相通电,并在B磁极上产生与A相相同的极性时,转子齿转动到B相上。为简化起见,图中A、B相定子齿由多齿简化为单齿。
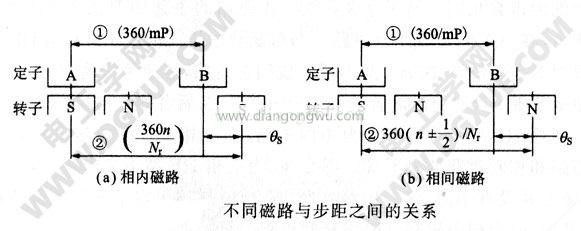
此时,与A相相对的转子齿与B相其次要相对的转子齿的节距②如图所示为360°n/Nr(n为整数),则步距角为①与②之差:
![]()
将式θs=180°/PNr代入上式中:
Nr=m(nP±1/2)
此为相内磁路时,转子齿Nr与相数P、主极数m的表达式。上式中Nr必为整数,否则没有意义。此时要注意m必须为偶数。
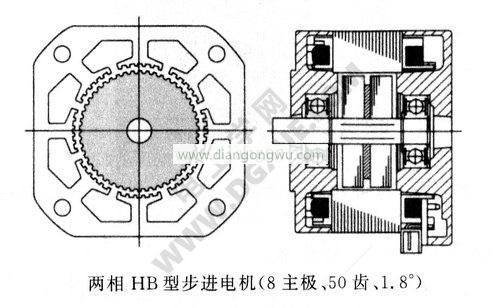
两相HB型混合式步进电机,当P=2时,主极为8(m=4)代入上式,得:Nr=8n±2
此为两相HB型混合式步进电机的关系式。两相HB型步进电机的步距角为通常的1. 8°,将n=6代入上式,得Nr=50。
两相HB型混合式步进电机定子主极为8,转子齿为50个的结构如下图所示。
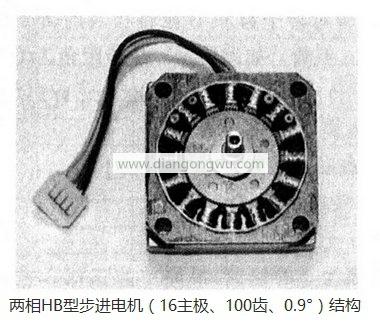
两相HB型步进电机的步距角为0.9°,定子主极为16,m=8,n=6,得转子齿为100个的结构如下图所示。
两相3.6°步进电机定子主极为4(在定转子间会产生不平衡电磁力,所以不鼓励使用此结构)时,依式Nr=m(nP±1/2),当P = 2,m=2,n=6时,得Nr=25。 小图为两相,定子4主极,3.6°的步进电机结构,其外形为42mm步进电机, 用于5寸48TPI的FDD(软盘驱动器)上。当为三相时,由式Nr=m(nP±1/2),m=4,n=4,P=3,得Nr=50。定子主极数为mP=12,步距角θs为1.2°。
