图2 接收信号仿真( N = 5 , a = 5 000/ s)
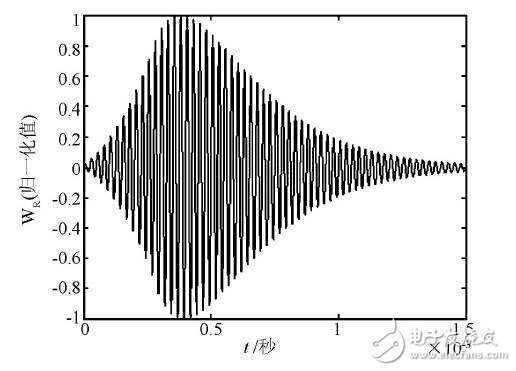
图3 接收信号仿真( N = 12 , a = 5 000/ s)
2 阈值和分辨率
阈值的选取,决定本测距系统的测量精度。 由于回波的能量大小受入射角、反射面大小、形状和材质、空气的湿度和温度等因素决定,为了较精确地测量文献中机器人与墙壁之间的距离,下面只针对超声波垂直入射墙壁,接受信号的大小进行分析。
在测量时,一旦有干扰物挡住超声波到墙壁的行进路径,则墙壁返回的信号将减弱,过高的阈值可能测不到墙壁回波信号,动态阈值因无规律可循而无法使用,故此阈值采用小固定值,因接收信号中的噪声峰值较稳定,固定阈值取3~5 倍噪声峰值。 由于墙壁回波信号不确定地高低变化,在标定测量参数时,用示波器采集信号,以接收信号包络峰值的0. 5 倍处(即图2 中n = 4 或5 处的时间) 作为距离信息。 这样处理的目的是: 即使接收信号过强或过弱,测距误差始终在3~5 cm 以内。 当N 过大时,盲区会增大同时测量精度也会下降,见图3.
多目标测量要能区分出两个不同目标。 由于阈值取得小,则系统的分辨能力很差,从图2 上可看出接收信号经1. 5 ms 后正弦幅值是包络峰值的0. 015倍。 图2 的波形只有在超声波垂直入射墙壁时才能得到,在大多数情况下接收信号从起振到包络峰值基本固定,但是接收信号从包络峰值以后各不一样,一般从起振经1. 5 ms~2 ms 后都会降到阈值以下。
在测量墙壁距离时,只要干扰物与墙壁保持30 cm以上距离则墙壁距离能较精确获得。
3 系统硬件
C8051 系列单片机具有丰富的模拟、数字外设和多种总线接口,支持在线编程,是很多测控系统的首选。系统硬件框图如图4 ,C8051F021 有5 个定时器,5 个PCA 通道,测4 个方向的超声波传感器发射头可共用1 个40 kHz 方波信号,实行同步发射;4 个接收头可接入PCA 的4 个通道。 信号放大电路的放大倍数在800 左右,即使接收信号经过带通滤波器,噪声峰值也达30 mv.
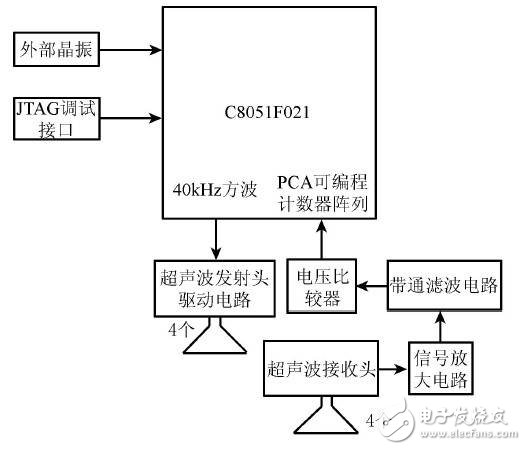
图4 单接收头多目标测量电路框图
图5 用示波器标定系统(只有一个发射头和一个接收头)
4 系统软件
系统软件基本构架如下:
void main ()